
The first prototype was working well, but the turning system itself wasn't up to par. The turns it took were not consistent and it was hard to control. The swivel wheel will be modified in the future. On the good side, the claw/arm was taller than the wall so it cleared it without a problem. The arm could go over the wall and drop the ball onto the other side.

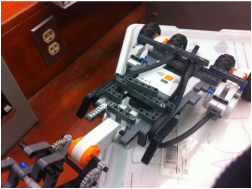
The second prototype was working really well with its turning, we removed the wheels and replaced it with a bar and some buffers/shims to increase the controllability of the turning. The only problem we have now is that the wires get in the way if the ball is raised to high and falls onto the nxt robot.
The third prototype included a way to part the wires so the ball couldn't get stuck on the robot. The wires used to hold a ball onto the robot and we would have to shake it off. Even though we had the wires tucked away, the ball could sometimes still get on the robot and get stuck. We look to eliminate this problem in the future. We also found at that more than half the time, the robot would pick the ball up and we, as an operator, put the arm to far up and let the ball roll onto the robot.

The fourth prototype fixed the two previous problems we had. We added a barrier sort of thing to make sure the arm couldn't move past a 90 degree angle. This eliminated all possible chances of the ball falling backwards off the arm.
The program we used to control the robot was an app called "NXT robot controller." We had to establish a bluetooth connection to control the robot.
